关于群体智能,牵扯到方方面面。其智能型可以由不同的载体去体现,无非就是 海 陆 空 三者。
由于“天上飞”牵扯多方面,本文先从“地上爬”的讲起,先看视频。
从个体说起:在视频中的群体智能系统中,个体数量是9个。
整个系统由三部分组成:个体、系统通信、控制台。在设计群体系统中的个体时,需要以下三点作为其个体设计的依据:1、自主决策:集群机器人自主成型过程中,个体间需要大量的通讯、运算、决策,如何选取一款大内存、高主频、低功耗的控制单元是设计机器人个体首要所在;2、全向运动:考虑集群系统初始状态下个体的随机性,机器人可能朝向任何方向移动,因此机器人具有全向运动能力是必不可少的;3、局部通信:集群机器人显著特点之一是系统的分布式、无中心控制。机器人个体只能通过与邻域内机器人局部通信才能获取自身的坐标、位置、运行状态等信息。因此选择合适的通信模块以建立稳健的通行网络是实现自主成型任务的核心环节;
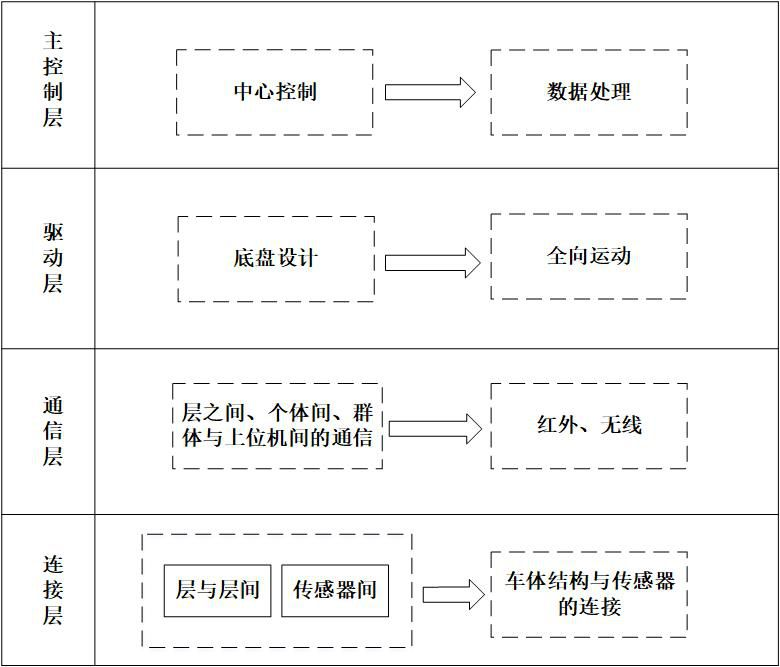
▲ 图1 个体设计的总体框图
在个体设计中,需要保证的首要先决条件就是:尽可能的小。只有个体的体积小,才能将群体中的个体数量做上去。本次设计的个体,采用三轮全向移动式,选取了N20电机。将其体积缩小至手掌大小。
▲ 图2 个体正面
▲ 图3 个体反面
在个体中,移动控制部分其控制硬件采用STM32F103C8T6,为了保证拆卸以及维修方便,采用了模块化设计。并未采用集成化。有待后续优化。
车体采用亚克力切割的方式进行搭建,车轮为60mm大小的全向轮,能实现全向移动。在调节小车移动控制部分,在运动过程中出现偏差是在所难免的,所以就需要有基于反馈的闭环自动调节单元,也就是说需要有相应的传感器配合一定的控制算法实现自动调节。从图3可以看出,在电机上安装了测速部分,采用霍尔编码器对其编码测速。霍尔编码器是由霍尔码盘和霍尔元件组成,霍尔码盘是在一定直径的圆板上等分地布置有不同的磁极。霍尔码盘与电动机同轴,电机旋转时,霍尔元件检测出若干脉冲信号,为判断转向,一般输出两组存在一定相位的方波差。单一传感器的数据并非真实可靠,为了更加科学的矫正其机器人移动姿态。还添加了MPU6050对其进行姿态矫正。多个闭环系统,可以达到较为稳妥的移动效果。
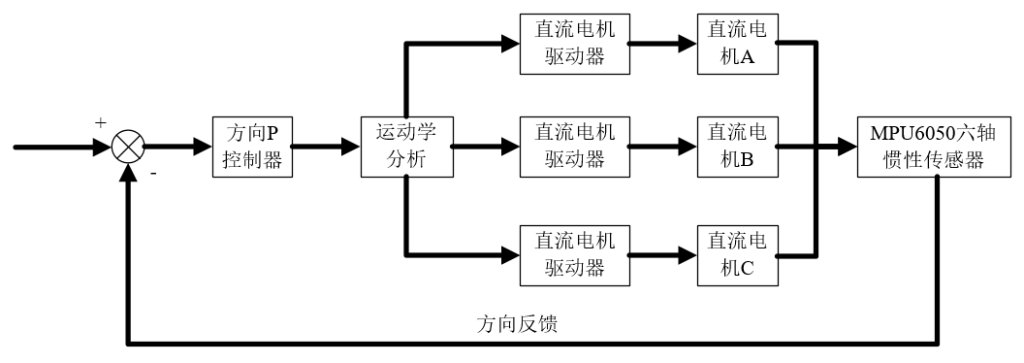
▲ 图4 方向P调节原理图
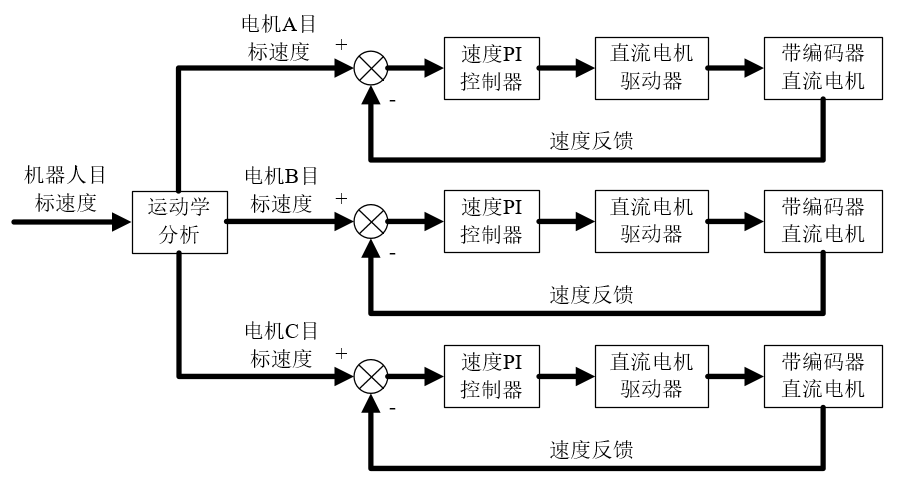
▲ 图5 速度PI调节原理图
关于个体设计部分,大概介绍到这里,篇幅有限,写多了反而没几个人能坚持看完,后面将继续更新关于上层决策、控制台等文章。